ورود / ثبت نام

نویسنده : 04 مهر 1400
زمان مورد نیاز برای مطالعه: 5 دقيقهکنترل کننده دور و گشتاور الکتروموتور روشی است برای انتقال انرژی از منبع به بار یا فرآیند مکانیکی تحت کنترل که با روش و استفاده از تجهیزات مختلف صورت می گیرد .
امروزه به دلیل امتیازات متعددی که موتورهای AC برخردار هستند استفاده از این نوع موتور ها به شکل گسترده ای در صنعت رواج یافته اند که از مهمترین دلایل آن می توان به موارد زیر اشاره کرد:
به رغم پیچیدگی در کنترل موتور های AC و توجه به امتیازات مورد اشاره به تدریج موتور های ACجایگزین موتور های DC در جایگاه های مختلف شده است . برای این امر از وسیله ای به نام مبدل فرکانسی قدرت یا اینورتر یا درایو استفاده می شود.
مطالعه بیشتر:
به منظور آگاهی از عملکرد اینورتر نیاز به شناخت عملکرد موتور القایی است.موتور القایی بسیار شبیه به یک ترانسفورماتور کارمیکند. زمانی که استاتور(سیم پیچی که روی بدنه خارجی و ثابت موتور قرار دارد )به یک منبع سه فاز متصلمی شود یک میدان مغناطیسی دوار با فرکانس منبع تغذیه توسط آن ایجاد می شود که این میدان با توجه به ساختار موتور ،بر اساس تعداد قطب ها و فرکانس منبع سرعت دوران آن تعیین می شود .
این میدان در فاصله هوایی بین روتور و استاتورایجاد شده در نتیجه اعمال آن به روتور باعث القای جریان در سیم پیچ های روتور ( میله های آلومینیومی یا مسی اتصال کوتاه شده) می شود .
این فرآیندبا تولید نیرو در اثر ایجاد جریان در روتور ، میدان مغناطیسی تولید شده در روتور میدان دوار استاتور دنبال کند سبب دوران روتور با سرعتی نزدیک به سرعت میدان دوار استاتور می شود .
با افزایش تعداد قطب ها یا زوج قطب استاتور دور روتور کاهش می یابد . به عنوان مثال دور میدن دوار برای موتور 2 قطب در فرکانس 50Hz دور آن 3000 دور بر دقیقه خواهد بود و برای موتور 4 قطب در فرکانس 50Hz دور آن 1500 دور در دقیقه می شود .اثر متقابل میدان روتور و استاتور به شکلی است که اگر دور روتور با سرعت دوران میدان دوار یکی شود گشتاور آن به صفر خواهد رسید . در نتیجه همیشه دور روتور مقدار از دور میدان دوار استاتور کمتر خاهد بود که به آن لغزش slip می گویند . سرغت دوران روتور به عواملی مانند فرکانس منبع تعداد قطب های استاتور ( نحوه سر بندی سیم پیچ های استاتور ) و طبیت و نوع بار مکانیکی متصل به شفت موتور وابسته است . با توجه به موراد توضیح داده شده تنها راه مناسب که می توان دور موتور را کنترل کرد از طریق کنترل فرکانس تغذیه می باشد که کم هزینه ترین و ساده ترین راه ممکن است .
جهت تغییر فرکانس ، تغییر ولتاژ نیز باید مورد توجه قرار گیرد چه با کاهش فرکانس ، امپدانس سیم پیچ
های موتور تغییر نموده و کاهش پیدا می کند اگر با کاهش فرکانس سطح ولتاژ کاهش پیدا نکند شار مغناطیسی به حدی افزایش پیدا می کند که موتور را به حالت اشباع می برد و موجب صدمه می شود . از سوی دیگر اگر فرکانس بیش از حد نرمال افزایش یابد ، ولتاژ بالاتری برای تامین ماکزیمم شار مورد نیاز است و این عملا روی نمی دهد زیرا با افزایش سرعت گشتاور Torque کاهش پیدا می کند. بنابراین برای کنترل دور ، علاوه بر فرکانس باید سطح ولتاژ نیز باید تحت کنترل واقع شود. در موتور های القایی نمودار سرعت و گشتاور مطابق شکل زیر است.
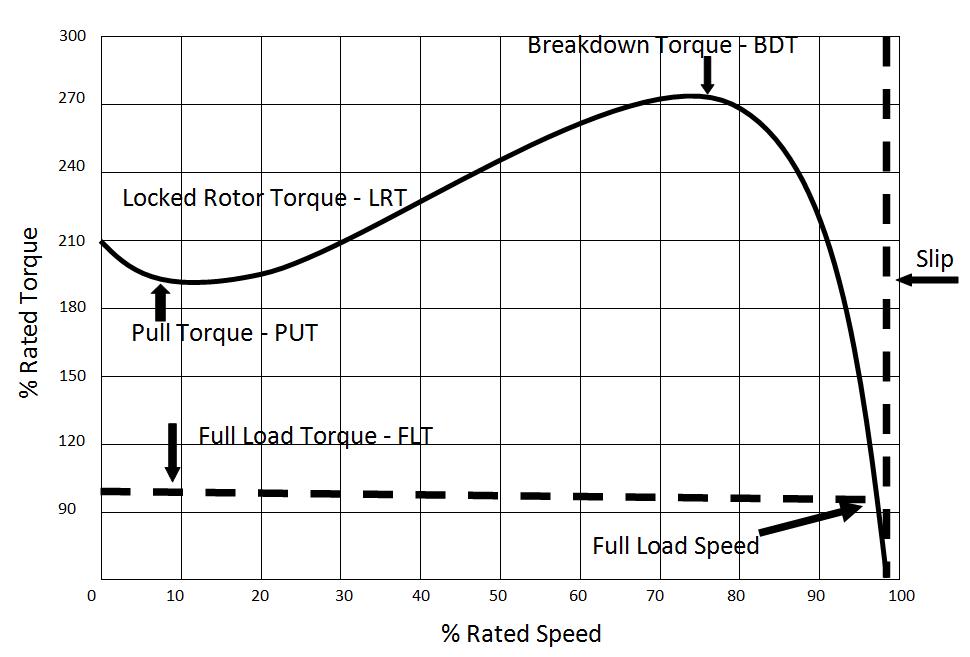
با مشاهده دقیقتر منحنی بالا در می یابیم که با افزایش سرعت از حالت سکون locked rortor torque به نقطه نرمال در ابتدا سرعت صفر گشتاور بالا بوده و به تدریج با افزایش سرعت ، گشتاور کاهش می یابد و پس از کمی افزایش سرعت این گشتاور مجددا شروع به افزایش می کند تا به نقطه Breakdown Torque و ماکزیمم گشتاور برسد و از آنجا شروع به کاهش کرده تا به نقطه کار نرمال یا نمای خود می رسد .
بنابراین رفتار موتور از شروع حرکت تا رسیدن به سرعت نامی رفتاری کاملا غیر خطی است. شایان ذکر است که در درایو موتور AC بدلیل غیر خطی نمودار درایو نمی تواند از روی محاسبهمقدار جریان پیش بینی کند که موتور در حال توقف یا سرعت گیری است. بنابراین برای تشخیص رفتار موتورتکنولوژی Vector Control کنترل برداری ایجاد شده است که وظیفه آن بررسی وضعیت سرعت موتور در حالت هایمختلف افزایش سرعت و کاهش سرعت است و براین اساس اینورتر می تواند تشخیص دهد که موتور در حال قفل شدن توقف، یا کاهش سرعت است یا در حال شتاب گیری یا افزایش سرعت.
با هدف تضمین عملکرد درایو در حالتهای پایدار و گذرا از تکنیک های مختلفی استفاده می شود . این تکنیک ها به دو گروه اصلی Scalar یا عددی و Vector برداری دسته بندی می شوند .
در تکنیک عددی فقط مقدار پارامتر مورد نظر تحت کنترل قرار می گیرد .اما در تکنیک برداری علاوه بر مقدار و زاویه هم (بردار)پارامتر مورد نظر کنترل می شود.
روشهای عددی:
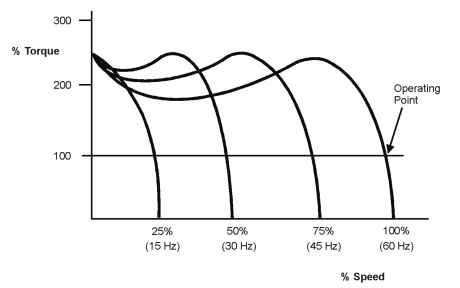
در این روش ولتاژ و فرکانس خروجی با نسبتی خاص (ثابت) به خروجی یا موتور اعمال می شود در این روش معمولا اینورتر یک ولتاژ اولیه اضافی Boost به منظور غلبه بر تلفات و همچنین رفتارغیر خطی موتور در فرکانس پایین به موتور اعمال می کند. در این حالت ، ولتاژ با افزایش فرکانس به تدریج افزایش پیدا کرده و سطح میدان مغناطیسی موتور را در حد مورد نیاز تثبیت می کند
یکی از روش های کنترل در اینورتر است که اساس آن بر مقایسه جریان خروجی که با دقت اندازه گیری شده با ولتاژ اعمالی به بار است . با این روش جریان خروجی حقیقی بار Loadو جریان مجازی شار مغناطیسی از یکدیگر جدا شده و درایواز طریق کنترل جریان مجازی ، شار مغناطیسی موتور را برای وضعیت ها و شرایط مختلف کاری بهبود می بخشد .
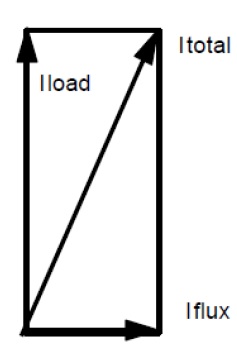
استفاده از این روش باعث بهبود کارائی موتور ، بهبود کنترل گشتاور و پاسخ سریعتر موتور به تغییرات خواهد شد .ولی کارایی آن از تکنیک Vector کمتر است .
این روش بر مبنای عملکرد موتور DCطراحی شده که در آن جریان میدان (تولید کننده شار میدان) و جریان آرمیچر (تولید کننده گشتاور) به صورت همزمان و مستقل از یک دیگر کنترل می شود .
کنترل مستقل این دو جریان از هم سبب بهبود کارائی ، کنترل مناسب گشتاور در سرعت پایین و پاسخ سریع به تغییرات بار خواهد شد.این شرایط در موتور های القایی تا حدودی متفاوت است . در موتور القایی جریان سیم پیچ استاتور تعیین کننده میزان شار میدان و در نتیجه گشتاور موتور است. بنابراین برای کنترل مستقل گشتاور و شار میدان نیاز به کنترل اندازه و اختلاف فاز جریان و بعبارت دیگر بردار جریان می باشد. برای تشکیل بردارجریان نیز نیاز به در اختیار داشتن موقعیت روتور می باشد. ازآنجا که درایو مقادیر ولتاژ ، جریان و فرکانس را به منظور اعمال به مدولاتور عرض پالس PWMتولید می نماید ، گشتاور موتور بصورت غیر مستقیم کنترل می شود.
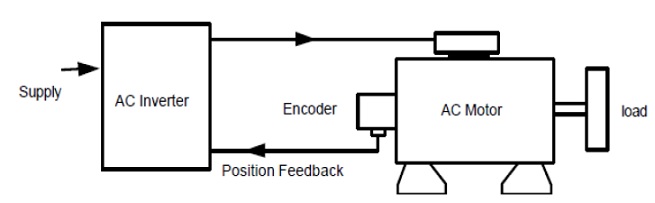
در این روش بر اساس تکنیک Field Orientation Controlپیاده سازی شده است و تنها در نحوه دریافت فیدبک با شیوه بالا متفاوت است . بدلیل پیچیدگی و هزینه اضافی استفاده از انکودر بعنوان فیدبک موقعیت ، در این شیوه به جای استفاده از فیدبک موقعیت برای تعیین موقعیت واقعی روتور از یک مدل ریاضی جهت محاسبه استفاده می شود. بدین منظوراینورتر باید :
- اندازه گیری دقیق ولتاژ و جریان خروجی
- داشتن اطلاعات دقیق از موتور شامل مقاومت استاتور و روتور .
- پیشینه ای از عملکرد موتور برای پیش بینی رفتار موتور به لحاظ دمایی داشته باشد.
- قابلیت انجام محاسبات با سرعت بسیار بالا REALTIMEداشته باشد.
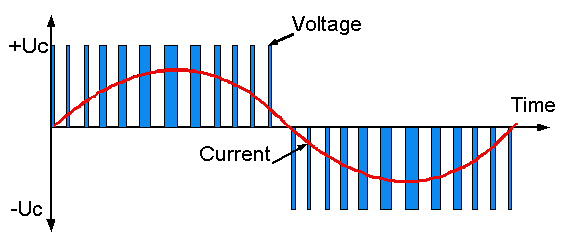
به مبدل الکترونیکی که جریان مستقیم را به جریان متناوب تبدیل می کند اینورتر گفته می شود. درایوهایی که موتور های AC را کنترل می کنند نخست جریان متناوب را به کمک یکسوساز یکسو نموده سپس آن را توسط اینورتر به یک تغدیه متناوب با فرکانس و ولتاژ قابل تغییر تبدیل می کنند.
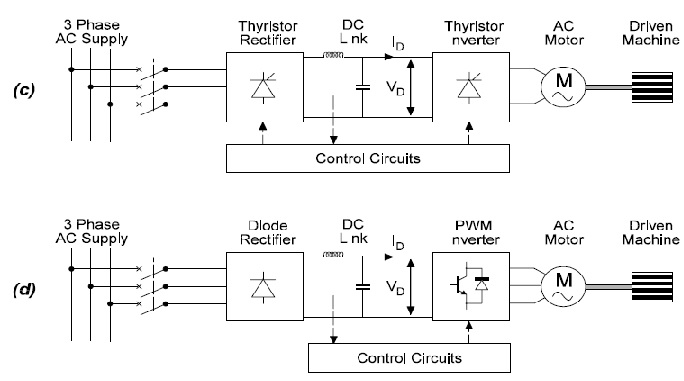
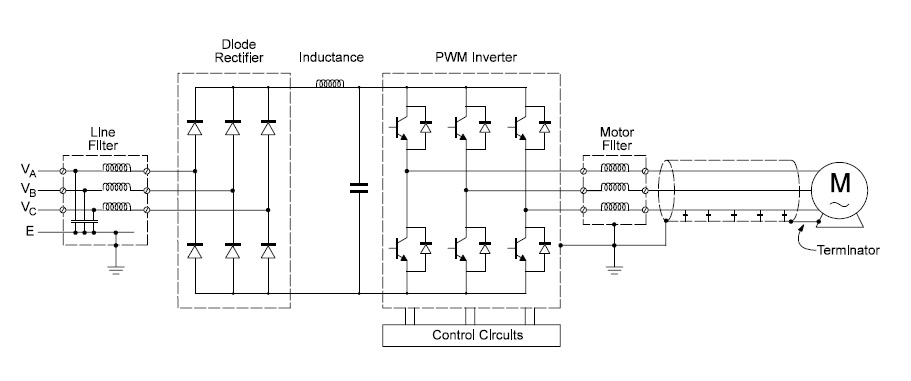
یکسو ساز تمام موج توسط یک منبع متناوب تکفاز یا سه فاز تغذیه شده و خروجی آن خازن های اتصال به DC Link را تغذیه می نماید. وظیفه خازنها تثبیت ولتاژ ورودی اینورتر ، کاهش رایپل یکسوساز و تامین انرژی درایو در وقفههای کوتاه تغدیه است این شرایط زمانی که اینورتر بار خروجی تغذیه می کند باعثنوسان بار در یکسو ساز شده که بر روی سایر قسمت مدار درایو اثر خواهد گذاشت .
برای دریافت اطلاعات بیشتر در خصوص مشخصات فنی و دریافت مشاوره خرید و استعلام قیمت به فروشگاه ویدفکتور مراجعه فرمایید:

































































































































































